
Steve Sandhoop, ein engagierter Schüler des Gymnasiums Filder Benden, hat für sein 5. Abiturfach einen Operationsroboter konstruiert, der eine Knie-Operation an einem 3D-gedruckten Kniegelenk simuliert. In einem ambitionierten Projekt zur Weiterentwicklung der roboterassistierten Chirurgie, brachte er sich selbst viel über Physik, Elektronik, Mechanik und Anatomie bei. Bei der Konstruktion des Roboterarms waren mehrere Überarbeitungen und Neudrucke notwendig, während er bei der Entwicklung des 3D-gedruckten Beines auf den Rat des Facharztes Dr. Thomas Bertrams vom Karl-Leisner-Klinikum in Kleve zurückgreifen konnte. – Jetzt staunt die Fachwelt!
Roboterarm durch digitalen Zwilling steuern
Eigentlich sollte nur mit Hilfe eines digitalen Zwillings ein Roboterarm gesteuert werden.
So knapp lässt sich die Ausgangsidee formulieren, die Steve vorschwebte, als er seinem Wunsch zu einer besondere Lernleistung formulierte.
Der Zufall wollte es, dass er Dr. Bertrams aus dem Karl-Leisner-Klinikum kennenlernte, der ihm von der roboterassistierten Chirurgie berichtete. Seine Idee nahm konkretere Formen an.
In der Folgemonaten tüftelte Steve für sein Projekt an einen 5DOF Roboterarm, der sich in fünf Achsen bewegen kann. Mehrfach musste der Roboterarm neu konstruiert werden, um die notwendige Bewegungsfreiheit und Stabilität zu erreichen. Für die Steuerung des Roboterarms mittels Software setzte Steve Inverse Kinematics ein, einen Algorithmus zur Berechnung der Winkel der Roboterarmachsen.
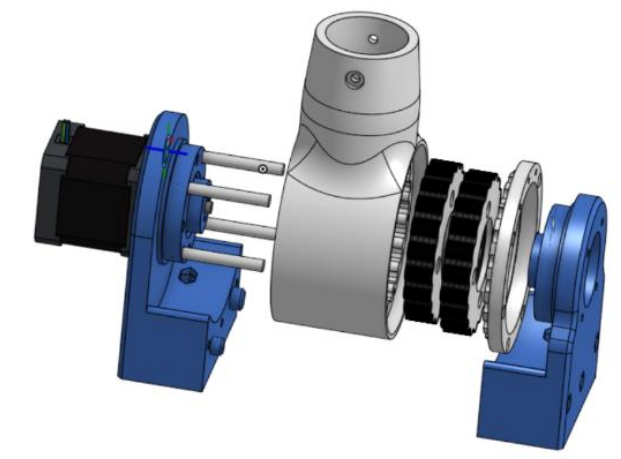
Besondere Motoren und besondere Getriebe
Im Gegensatz zu herkömmlichen Robotern mit Servomotoren, nutzt Steve in seinem Projekt für den Roboterarm ein spezielles Getriebe, bekannt als Cycloidal Drive, um die Leistung der Schrittmotoren zu verstärken. Diese klein dimensionierten Getriebe ermöglichen eine hohe Drehmomentübertragung bei geringem Raumbedarf und Gewicht, was sie ideal für den Einsatz in seinem Roboterarm macht. Trotz des komplexen Konstruktions- und Montageprozesses, konnte er durch diese Technik eine Übersetzung von 1:20 erreichen und somit die Effizienz und Präzision des Roboterarms deutlich steigern.

Grenzen erkennen oder wissen, wo man man bohren darf
Steve hat mit Hilfe des Path-Fill-Algorithmus den Roboterarm in die Lage versetzt, eine ausgewählte Fläche am Knie selbstständig zu entfernen. Dieser besondere Algorithmus erzeugt einen eindimensionalen Pfad, der eine einfache Fläche, wie ein Viereck, vollständig durchläuft, und kann auf beliebige Polygone übertragen werden. Zusätzlich wurde dieser Pfad in eine dreidimensionale Projektion umgewandelt, um die Effizienz und Präzision der roboterassistierten Operation zu maximieren.
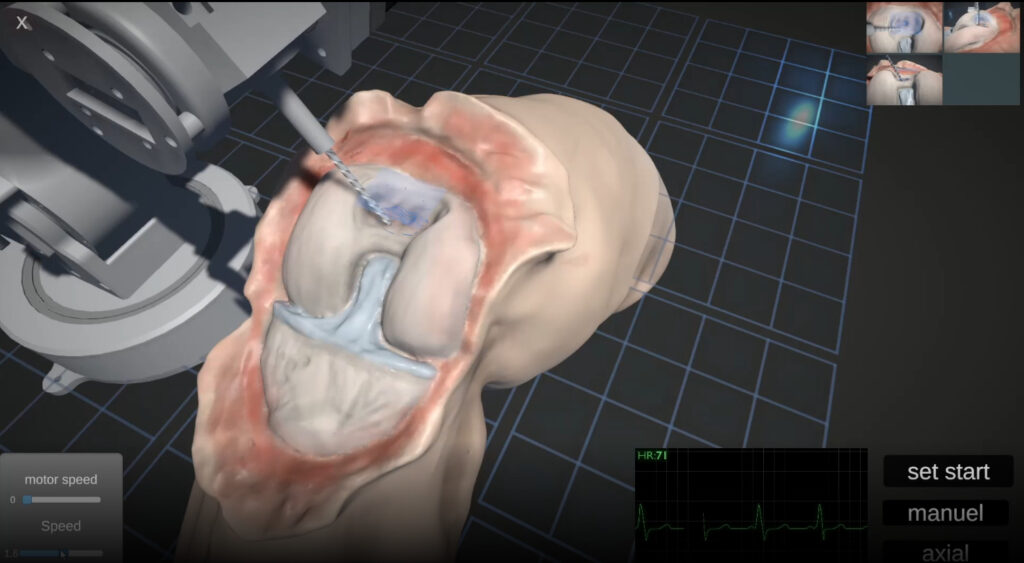
Knie und Bein 3D modellieren mit Blender

Um eine Knieoperation zu simulieren, entschied Steve Sandhoop, ein eigenes Kniemodell zu entwerfen, da die vorgefertigten Modelle oft kostspielig sind. Unterstützt durch Dr. Bertrams und gestützt auf seine fortgeschrittenen Kenntnisse in der 3D-Modellierung, erstellte er verschiedene Entwürfe des Kniemodells, die schließlich im richtigen Maßstab 3D-gedruckt wurden. Als das Kniemodell allein nicht ausreichend war, erweiterte er sein Projekt auf die Modellierung des gesamten Beines. Mit einer Internetvorlage als Basis fügte er in Blender weitere Details hinzu und positionierte das Bein mit Hilfe eines Rigs in einer operationsgeeigneten Haltung.
Bei der Umsetzung seines Projekts erhielt er Unterstützung von Herrn Lachmann, einem Informatiklehrer des Gymnasiums, sowie finanzielle Hilfe durch den Förderverein des Gymnasiums und das Karl-Leisner-Klinikum. Zudem trugen die Hochschule Rhein-Waal und die Firma Simac GmbH mit ihrem Know-how zum Erfolg des Projekts bei.
Ein weiterer besonderer Dank gilt der Firma PTC, die uns das CAD-Programm Onshape kostenlos zur Verfügung stellen und uns mit Rat und Tat zur Seite stehen.
Fachwelt ist begeistert – Wenn Hannover sich meldet!

Das professionelle Ergebnis wurde sogar mit einer Bachelorarbeit verglichen und hat großes Medienecho erzeugt. Highlight war die Einladung zu Deutschlands größter Tüftler- und Bastler-Messe, der Maker-Faire, wo Steve die Möglichkeit erhielt, seine Knie-OP-Simulation auszustellen.
Kurz nach der Abi-Prüfung hatten sich schon das WDR-Fernsehen, Radio KW und zahlreiche Lokalzeitungen über Steves Leistung berichtet. Mittlerweile ist die Fachwelt auf das Projekt am GFB aufmerksam geworden.
Bemerkenswert ist, dass Steve einen englischen Podcast aufgenommen hat, den man z.B. unter Spotify anhören kann. Zu den besonderen Highlights gehört die Berücksichtigung bei den VDI-Nachrichten.
Diese Fachmagazine haben über die OP im Klassenzimmer berichtet:
- vdi-nachrichten: wartet auf die Veröffentlichung
- Itbusiness.ch: Weltweit erste simulierte Knie-OP im Klassenzimmer
- Ctrl-tec.de: https://www.ctrl-tec.de/archiv/weltweit-erste-simulierte-knie-op-im-klassenzimmer/
- It-zoom.de: https://www.it-zoom.de/mobile-business/e/simulierte-knie-operation-im-klassenzimmer-32805/
- Aktuelle Technik Schweiz: Abiturient entwickelt OP-Roboter Weltweit erste simulierte Knie-OP im Klassenzimmer
- Pressebox Portal: https://www.pressebox.de/pressemitteilung/ptc/weltweit-erste-simulierte-knie-op-im-klassenzimmer/boxid/1163316
- All-electronics.de: https://www.all-electronics.de/automatisierung/weltweit-erste-simulierte-knie-op-im-klassenzimmer-514.html
- Englischer Podcast: Education in engineering: The Student who Built a Surgical Robot Arm | PTC
Besondere Leistungen am GFB – die Regel und kein Einzelfall
In der Tat hat Steve Sandhoop mit seinem Projekt gezeigt, was einzelne SchülerInnen zu leisten im Stande sind. Ein Einzelfall ist er aber nicht. Besonderes Leistungsvermögen wird am GFB durch unterschiedliche Maßnahmen gefördert. Die Durchführung des 5. Abiturfaches gehört dazu.
Allein in diesem Jahr haben drei Schüler ihre besondere Lernleistung mit der Bestnote absolviert.
Natürlich suchen wir nach Talenten, aber vielleicht bist du unseren Scouts auch noch nicht aufgefallen.
Frage doch einfach mal im Oberstufenbüro nach, was wir für dich tun können.
Mit dieser hervorragenden Leistung blicken wir gespannt auf Steves Werdegang und wünschen ihm weiterhin viel Erfolg.
Marc Lachmann
Weitere Informationen:
Modell des Roboterarms: https://sketchfab.com/3d-models/4dof-stepper-roboterarm-3d-model-3a6f4f4c5f214f2aa0e18d6bf9009a0b
Bein-Modell: https://sketchfab.com/3d-models/bein-mit-knie-gelenk-3d-modell-77a8675a122a41fdb3577b208a2924df
Video des digitalen Zwillings mit Prototypen: https://roboterarm-resources.netlify.app/vids/Digitaler%20Zwilling.mp4





